Aperçu des sections
Section 1
Dans ce chapitre, on s'íntéresse à la solution numérique des systèmes linéaires qui fait partie de l'analyse numérique matricielle. En effet, il y'a deux types de méthodes de résolution de systèmes linéaires : celles dites directes ; donnant la solution exacte après un nombre fini d'opérations élémentaires, et celles dites itératives ; engendrant une suite de solutions approchées qui converge vers la solution exacte, en se fixant une précision à atteindre.
Section 2
La modélisation consiste en la traduction et représentation d'une situation concrète en un ensemble de relations mathématiques.
Pour trouver un tel modèle mathématique, on a trois entités à identifier:
i) L'ensemble des actions (activités) qui s'offrent à l'agent de décision (variables).
ii) L'objectif visé exprimé sous la forme d'une fonction mathématique (fonction objectif).
iii) Les règles définissant la nature du système à l'étude exprimées en termes de relations mathématiques (contraintes).
- Cette section
TP Optimisation
Chargé du TP: M. Sahari Mohamed Lamine
mail: mlsahari@gmail.com
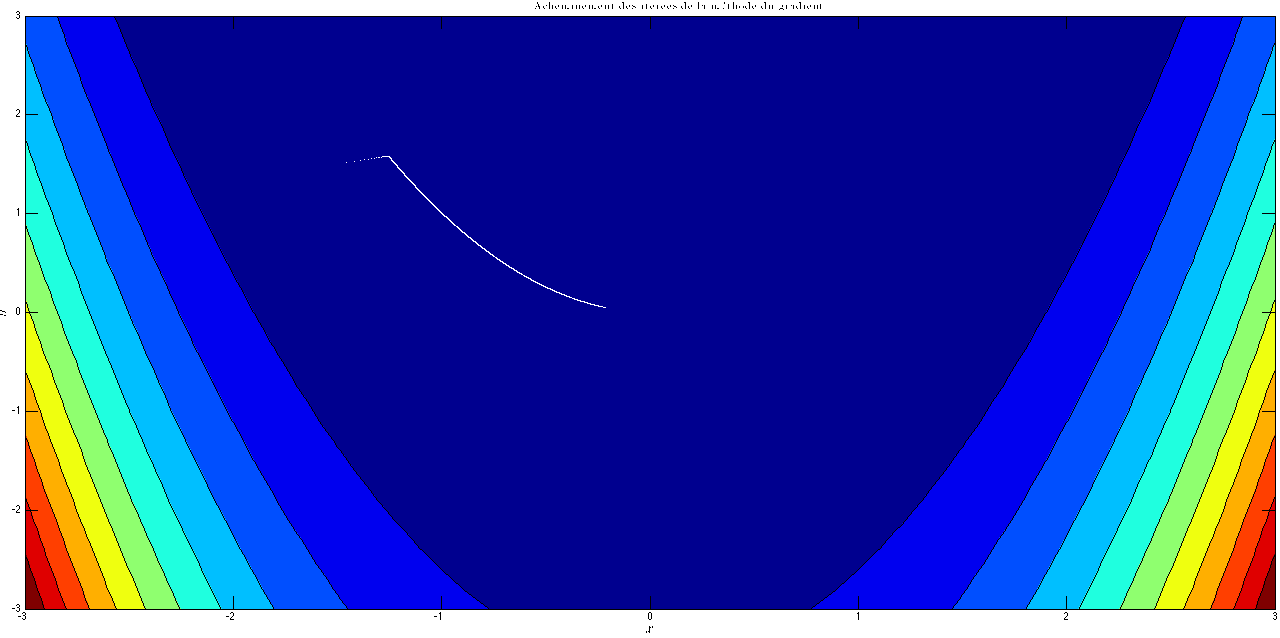
Une animation montrant la convergence lente de la méthode du gradient à pas fixe Le prochain TP:
- Méthode du gradient dans
 ,
, 
- Méthode du gradient dans , avec recherche linéaire
- Méthode du gradient dans
La méthode du gradient dans
 à pas fixe pour la fonction de Rosenbrock:
à pas fixe pour la fonction de Rosenbrock:=100(y-x^2)^2+(1-x)^2")
- Compléter le code de la recherche linéaire !
- Compléter le code de la recherche linéaire !
Modifier le code du TP N°4 pour ajouter une recherche linéaire inexacte d'Armijo.
Un pas
 choisit selon la règle d'Armijo vérifie la condition:
choisit selon la règle d'Armijo vérifie la condition:\leq m\theta^{\prime}(0)t^{\ast}+\theta(0)")
Où

Modifier le code du TP N°4 pour ajouter une recherche linéaire inexacte de Goldestein.
Un pas
choisit selon la règle de Goldestein vérifie les deux conditions:\leq m_{1}\theta^{\prime}(0)t^{\ast}+\theta(0)")
et
\geq m_{2}\theta^{\prime}(0)t^{\ast}+\theta(0)")
Où

Modifier le code du TP N°4 pour ajouter une recherche linéaire inexacte de Wolfe.
Un pas
choisit selon la règle de Wolfe vérifie les deux conditions:et
\geq m_{2}\theta ^{\prime }(0)")
Où
Dans le code du TP N°5:
- Ajouter une fonction qui calcul la matrice hessienne de la fonction

- A l'aide de la fonction matlab inv (voir https://fr.mathworks.com/help/matlab/ref/inv.html) calculer l'inverse de la matrice hessienne en un point donné.
- Introduire la direction de Newton donnée par :
 et
et )^{-1}\,g(x_k)") ; où
; où ") est le gradient en
est le gradient en  et
et ") est le hessien en .
est le hessien en . - Exécuter le code et corriger les erreurs eventuelles
- Ajouter une fonction qui calcul la matrice hessienne de la fonction